
A robot butler in your home by 2036 is a fantasy
If you’ve spent any time on social media lately, you’ve seen them: sleek, metallic bipeds performing backflips in China, dancing to Motown, or gingerly stacking the dishwasher or placing a singular box on a shelf. The robotics hype cycle suggests that in four years’ time (2030), a robot will be folding your laundry and helping your nanna out of bed.
Despite billions of dollars invested, however, they remain science experiments confronting daunting technical challenges.
Ask Rodney Brooks – the MIT professor who basically pioneered the field and founded Rethink Robotics – and he’ll tell you to calm the farm too. In fact, he’s calling much of the current industry rhetoric “downright delusional.”
In today’s post, we explore why, based on Brooks’s decades of academic and successful commercial experience, the dream of a humanoid domestic helper is staying on the shelf for at least another decade.
- Bipedal
The argument goes that humans are programmed to be comfortable and familiar with looking at and interacting with the human form. An argument also exists that Earth is designed for bipedal access (tell that to a four-legged creature or a snake!).
Brooks believes the current corporate obsession with bipedal robots is holding back the development of more useful forms. The dream of widespread robot adoption will be delayed by the current corporate obsession with humanoid forms. Only when robotics corporations realise the limitations will they be free from this handbrake.
Figure 1. Humanoid Robots
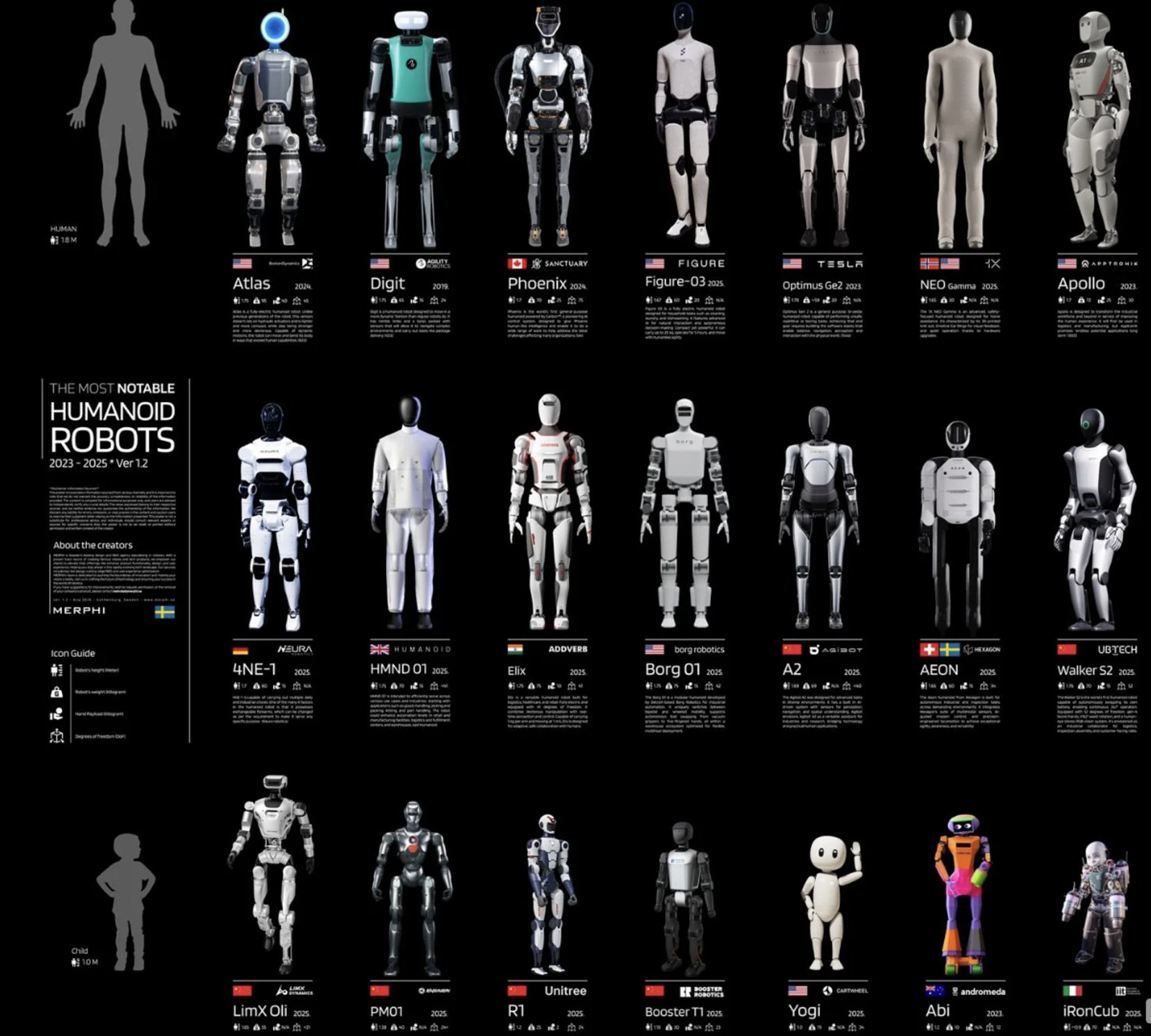
Source: Merphi
- Pathetic dexterity
The most glaring issue isn’t walking; it’s touching. We take for granted the sheer complexity of the human hand. Brooks points out this is a massive and almost insurmountable hurdle for robots to ‘learn’.
“Deployable dexterity will remain pathetic compared to human hands beyond 2036… In the next ten years, deployable dexterity may improve markedly, but not in the way the current hype for humanoid robots suggests.”
The problem, according to Brooks, is current artificial intelligence (AI) models are “collecting the wrong data” and “trying to learn the wrong thing.” While a robot might learn to pinch a specific cup in a lab, it struggles with the messy, multi-object manipulation humans do effortlessly – like reaching into a junk drawer to find a specific key while moving three other items out of the way, or trying to plug your headphones into your iPhone, while holding a heavy grocery bag that’s about to break and an open umbrella – in the wind. You get the idea.
Figure 2. Robotic Hands

Source: Merphi
- Weight paradox
In a factory, if a robot malfunctions, you hit the emergency stop button, everything powers down, and the machine freezes. But as Brooks points out, you can’t do that with a 100kg biped without creating a mechanical catastrophe – they’ll hurt someone or something when they fall over, and they can’t get back up.
To be useful (like lifting an elderly person), a robot needs strength. Strength requires heavy motors and batteries. As Brooks notes, however, the weight creates a danger when in close proximity to humans, and that danger is “roughly cubically proportional to the weight of the robot.”
If you cut the power to a balancing robot to keep it from hitting someone, it simply falls over. A falling 100kg robot is almost as dangerous as a hitting one.
While Brooks’s older robots, Baxter and Sawyer, used clever “back-current” braking systems to safely freeze their arms, a full-body humanoid that can “fail-safe” while walking among toddlers and pets hasn’t been invented yet.
And if you build humanoid robots lighter, in an effort to make them safer, they won’t have the carrying capacity required of them. They simply won’t be strong enough to perform the work they were intended for.
- General purpose myth
CEOs in the humanoid space are promising an adoption rate that defies human history. One claim suggests humanoids will be in 10 per cent of households by 2030. Brooks points out that this would be “multiple orders of magnitude faster than any other technology in human history,” including the smartphone and the internet.
Currently, the “practical work” shown in demos is often a mirage. Brooks highlights the gap between PR and reality:
- Battery life: Measured in minutes, not hours.
- Tele-operation: Many “autonomous” demos are actually being remote-controlled by a human behind the curtain.
- Recovery: If a humanoid falls in your living room today, it stays there until a human picks it up.
- “Ship of Theseus” transition
Brooks doesn’t think robots won’t exist; he thinks they just won’t look like us. He predicts a “pivot” where the definition of a humanoid robot drifts to become something practical:
“Before too long… humanoid robots will get wheels for feet… then there will be versions which variously have one, two, and three arms… they may have eyes in their hands, and even eyes looking down from near their crotch to see the ground… But they will still be called humanoid robots.”
We won’t have C-3PO; we’ll have highly specialised, wheeled machines with sensors in weird places that happen to be marketed as “humanoid” to keep the investors happy.
A reality check
As the Wall Street Journal (WSJ) recently noted, even the companies making these robots are starting to temper expectations. We are currently in the “Apple Newton” phase of robotics – the right idea, but the technology isn’t up to it.
The successful robots of 2035 won’t be our twins; they will be the machines that finally stop “dancing” and start doing the dishes – even if they have to use three arms and a set of wheels to do it.
I conclude with the conjunction, from RodenyBrooks.com, which you’d have to accept if you want to believe the promises of many of the most optimistic CEO in the robotics field:
- Their robots have not demonstrated any practical work (I don’t count dancing in a static environment, doing exactly the same set of moves each time, as practical work).
- The demonstrated grasping, usually just a pinch grasp, in the videos they show is painfully slow and not something that will be useful in practice.
- They claim their robots will learn human-like dexterity, but they have not shown any videos of multi-fingered dexterity where humans can and do grasp things that are unseen, and grasp and simultaneously manipulate multiple small objects with one hand. And no demonstrations of using the body with the hands, which is how humans routinely carry many small things or one or two heavy things.
- They show videos of non-teleoperated manipulation, but all in-person demonstrations of manipulation are teleoperated.
- Their current plans for robots working in customer homes all involve a remote person tele-operating the robot.
- Their robots are currently unsafe for humans to be close to when they are walking.
- Their robots have no recovery from falling and need human intervention to get back up.
- Their robots have a battery life measured in minutes rather than hours.
- Their robots cannot currently recharge themselves.
- Unlike human carers for the elderly, humanoids are not able to provide any physical assistance to people that provides stabilising support for the person walking, getting into and out of bed, getting on to and off of a toilet, or indeed any touch-based assistance at all.
- The CEOs claim that their robots will be able to do everything, or many things, or a lot of things, that a human can do in just a few short years. They currently do none.
- The CEOs claim a rate of adoption of these humanoid robots into homes and industries at a rate that is multiple orders of magnitude faster than any other technology in human history, including mainframe computers, and home computers and the mobile phones, and the internet. Many orders of magnitude faster – that they will be in 10 per cent of U.S. households by 2030. Absolutely no technology (even without the problems above) has ever come close to scaling at that rate.
Roger Montgomery is the Founder and Chairman of Montgomery Investment Management. Roger has over three decades of experience in funds management and related activities, including equities analysis, equity and derivatives strategy, trading and stockbroking. Prior to establishing Montgomery, Roger held positions at Ord Minnett Jardine Fleming, BT (Australia) Limited and Merrill Lynch.
He is also author of best-selling investment guide-book for the stock market, Value.able – how to value the best stocks and buy them for less than they are worth.
Roger appears regularly on television and radio, and in the press, including ABC radio and TV, The Australian and Ausbiz. View upcoming media appearances.
This post was contributed by a representative of Montgomery Investment Management Pty Limited (AFSL No. 354564). The principal purpose of this post is to provide factual information and not provide financial product advice. Additionally, the information provided is not intended to provide any recommendation or opinion about any financial product. Any commentary and statements of opinion however may contain general advice only that is prepared without taking into account your personal objectives, financial circumstances or needs. Because of this, before acting on any of the information provided, you should always consider its appropriateness in light of your personal objectives, financial circumstances and needs and should consider seeking independent advice from a financial advisor if necessary before making any decisions. This post specifically excludes personal advice.